 da
da en
en es
es fr
fr it
it nb
nb nl
nl pt
pt sv
sv fi
fi- Startseite
- Neuigkeiten
- Wie Automotive Ethernet zur Entwicklung von Domänencontrollern beiträgt
Wie Automotive Ethernet zur Entwicklung von Domänencontrollern beiträgt
Es gab eine Zeit, in der jedes Steuergerät im Auto völlig autark arbeitete und daher über eigene Sensoren und Aktoren verfügte. Diese Sensoren und Aktoren wurden daher direkt an das Steuergerät angeschlossen. Einfach und effektiv. Da jedoch die Anzahl der Sensoren, Aktoren und Steuergeräte immer weiter zunahm, wuchsen auch die Kabelbäume. Bald waren buchstäblich kilometerlange Kabel nötig und der Überblick war kaum noch vorhanden. Das musste besser werden.
Und deshalb wurde Anfang der 1990er Jahre das CAN-Netzwerk eingeführt. Steuergeräte könnten plötzlich Informationen untereinander austauschen, darunter auch Signale von Sensoren. Eine wahre Revolution in der Automobilwelt. Seitdem hat sich die Netzwerkarchitektur innerhalb eines Fahrzeugs kontinuierlich weiterentwickelt. Und mit der Einführung von Elektroantrieben und autonomer Technologie werden in naher Zukunft garantiert noch größere Fortschritte erzielt.

Das bedeutet aber auch, dass sich viel an der Art und Weise ändern wird, wie Elektronik in einem Fahrzeug implementiert wird. Lange Rede, kurzer Sinn: Innerhalb von 10 Jahren wird ein Domänencontroller oder Supercomputer für alle Funktionen im gesamten Antriebsstrang verantwortlich sein. Das Steuergerät, wie wir es heute kennen, wird dann eine untergeordnetere Rolle spielen. Und während sich diese Domänencontroller und die damit verbundenen Netzwerke weiterentwickeln, werden die einzelnen Steuergeräte langsam verschwinden (ja, auch das Steuergerät), bis schließlich nur noch eine Handvoll Domänencontroller oder Supercomputer das Sagen haben.
Zuvor wollen wir aber noch etwas näher auf das Netzwerk eingehen, das dabei eine wichtige Rolle spielen wird. Denn obwohl Automotive Ethernet schon seit geraumer Zeit verfügbar ist, wird es immer raffinierter.
Der Anfang: Ein zentrales Gateway
Die Automobilindustrie ist ständig auf der Suche nach immer mehr Datengeschwindigkeit und immer mehr Möglichkeiten zur gegenseitigen Kommunikation. Bereits im Jahr 2004, bei der Entwicklung des FlexRay-Netzwerks, wurde den Automobilherstellern klar, dass sie bei der Kommunikation zwischen den verschiedenen Steuergeräten neue Wege gehen mussten. Der Umfang der Software-Updates geriet außer Kontrolle und angesichts der Geschwindigkeit des damals genutzten HS CAN dauerte ein Update buchstäblich Dutzende Stunden. Für die Garage natürlich unbrauchbar.
Die Lösung kam 2008 in Form eines zentralen Gateways, das nicht nur die Aufgabe hatte, Daten zwischen den verschiedenen bestehenden CAN-, FlexRay- und MOST-Netzwerken (Media Oriented Systems Transport) auszutauschen, sondern auch als Schnittstelle zur Außenwelt diente Diagnose und Programmierung (Software-Updates etc.). BMW war der erste mit einem solchen neuen zentralen Gateway.
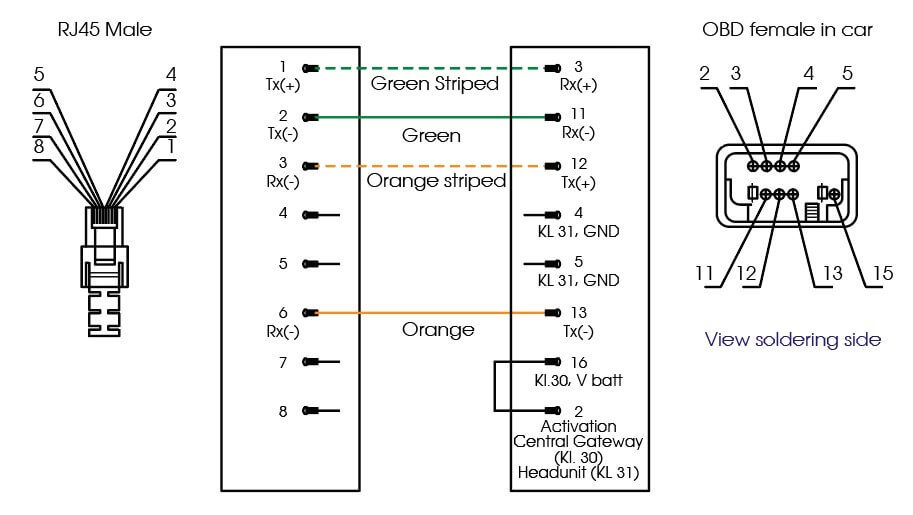
Pin 3, 11, 12 und 13 im OBDII-Port werden zur Kommunikation mit der Außenwelt über eine Ethernet-Verbindung verwendet
Der OBDII-Anschluss verfügte also nicht mehr über zwei CAN-Leitungen für die Kommunikation der Händlergeräte mit dem Auto, sondern über vier Ethernet-Leitungen, die genau dem RJ-45-Anschluss entsprechen, den wir aus dem Ethernet in Computernetzwerken so gut kennen. Die Pins 3, 11, 12 und 13 im OBDII-Port werden somit zur Kommunikation mit der Außenwelt über eine Ethernet-Verbindung genutzt.
Automotive-Ethernet-Standard: 100BASE-T1
Die Ethernet-Technik gibt es natürlich schon seit einiger Zeit. Aufgrund der sehr strengen Anforderungen an Chips und andere elektronische Komponenten gab es jedoch keine Anwendung für die Automobilindustrie. Da Ethernet bis 2004 noch nie in Fahrzeugen zum Einsatz kam, mussten speziell für diese Zwecke ganz neue Chips, Halbleiter und Schalter entwickelt werden. Und auch die Verkabelung war eine Herausforderung, denn aus mehreren Gründen bestand der Wunsch, 100 Mbit/s auf einem ungeschirmten Twisted-Single-Pair-Kabel (einem Kabel wie CAN und FlexRay) zu erreichen. Letztendlich entstand daraus ein neuer Ethernet-Standard speziell für die Automobilindustrie: 100BASE-T1. Es wurde 2013 eingeführt und hatte eine Datenrate von 50 Mbit/s. Im Jahr 2020 wurde 1000BASE-T1 eingeführt, das eine Datenrate von 1000 Mbit/s (1 Gbit/s) liefern kann. Wir arbeiten bereits mit Hochdruck daran, Geschwindigkeiten von 50 Gbit/s zu erreichen.
Möglichkeiten für die Zukunft
Da Ethernet zu einem festen Bestandteil des Alltags geworden ist, sind die Möglichkeiten endlos. Die Computertechnik aktueller PCs, Laptops und Tablets kann mit Automotive Ethernet auch in Fahrzeugen implementiert werden. Damit ist auch die grafische Rechenleistung für autonomes Fahren kein Problem mehr.
Um sich ein klares Bild vom Wandel in der Netzwerkarchitektur zu machen, muss man sich darüber im Klaren sein, wie die Kommunikation in aktuellen Fahrzeugen (3. Generation) gestaltet ist. Im Bild unten ist das zentrale Tor als größter violetter Block dargestellt. Die kleineren grünen Blöcke sind Steuergeräte, die jeweils über ein eigenes Kommunikationsnetzwerk verfügen: LIN, CAN oder FlexRay.
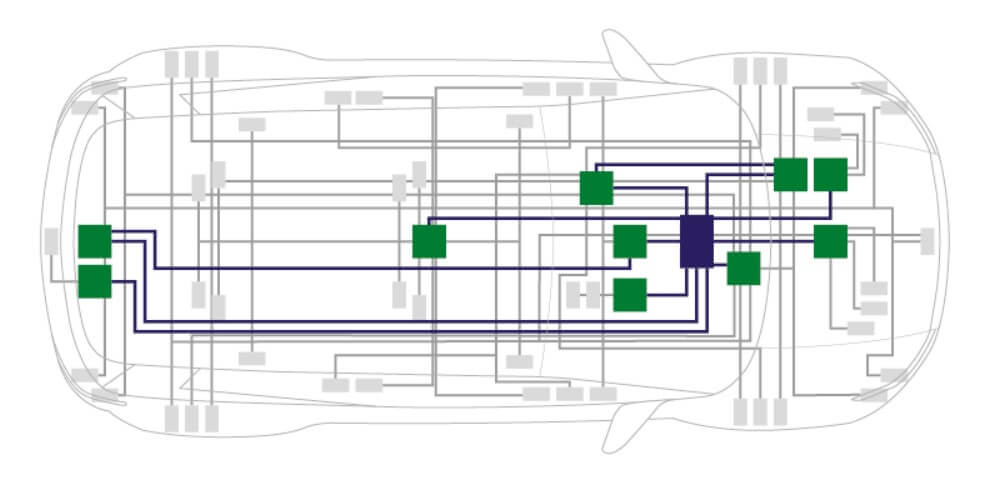
Kommunikationsnetzwerkarchitektur in aktuellen Fahrzeugen (3. Generation)
Allerdings nimmt die Zahl der Steuergeräte zu und die aktuellen Steuergeräte werden ihren Aufgaben in naher Zukunft nicht mehr gewachsen sein. Daher werden sich unter dem zentralen Gateway Domänencontroller befinden, die alle ebenfalls über das Ethernet kommunizieren (ebenfalls lila dargestellt). Einer dieser Domänencontroller wird sich ausschließlich auf alle Daten und Funktionen rund um das autonome Fahren konzentrieren. In diesem Netzwerk der 4. Generation wird es sicherlich weiterhin Steuergeräte und Subnetzwerke geben, aber das Netzwerk wird dort die Geschwindigkeit haben, die benötigt wird.
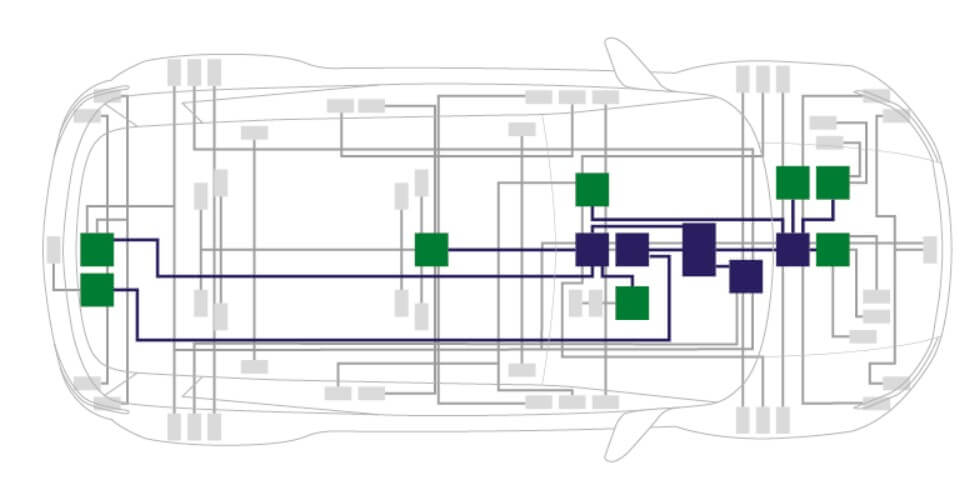
Kommunikationsnetzwerkarchitektur in Fahrzeugen der nahen Zukunft (4. Generation)
Wie ein Netzwerk der 5. Generation in der Praxis genau aussehen wird, lässt sich nur schwer vorhersagen, doch nach der Implementierung von Domänencontrollern ist ein klarer Trend zu erwarten: Durch die massive Reduzierung der Komponenten wird der Aufbau deutlich weniger komplex. Durch die Einführung intelligenter Sensoren und Aktoren wird der Einsatz von Steuergeräten völlig überflüssig. Was bleibt, ist ein leichtes, aber leistungsstarkes Netzwerk aus wenigen Domänencontrollern oder Supercomputern, die durch enge Zusammenarbeit alle Systeme im Fahrzeug verwalten.